
About
Projects
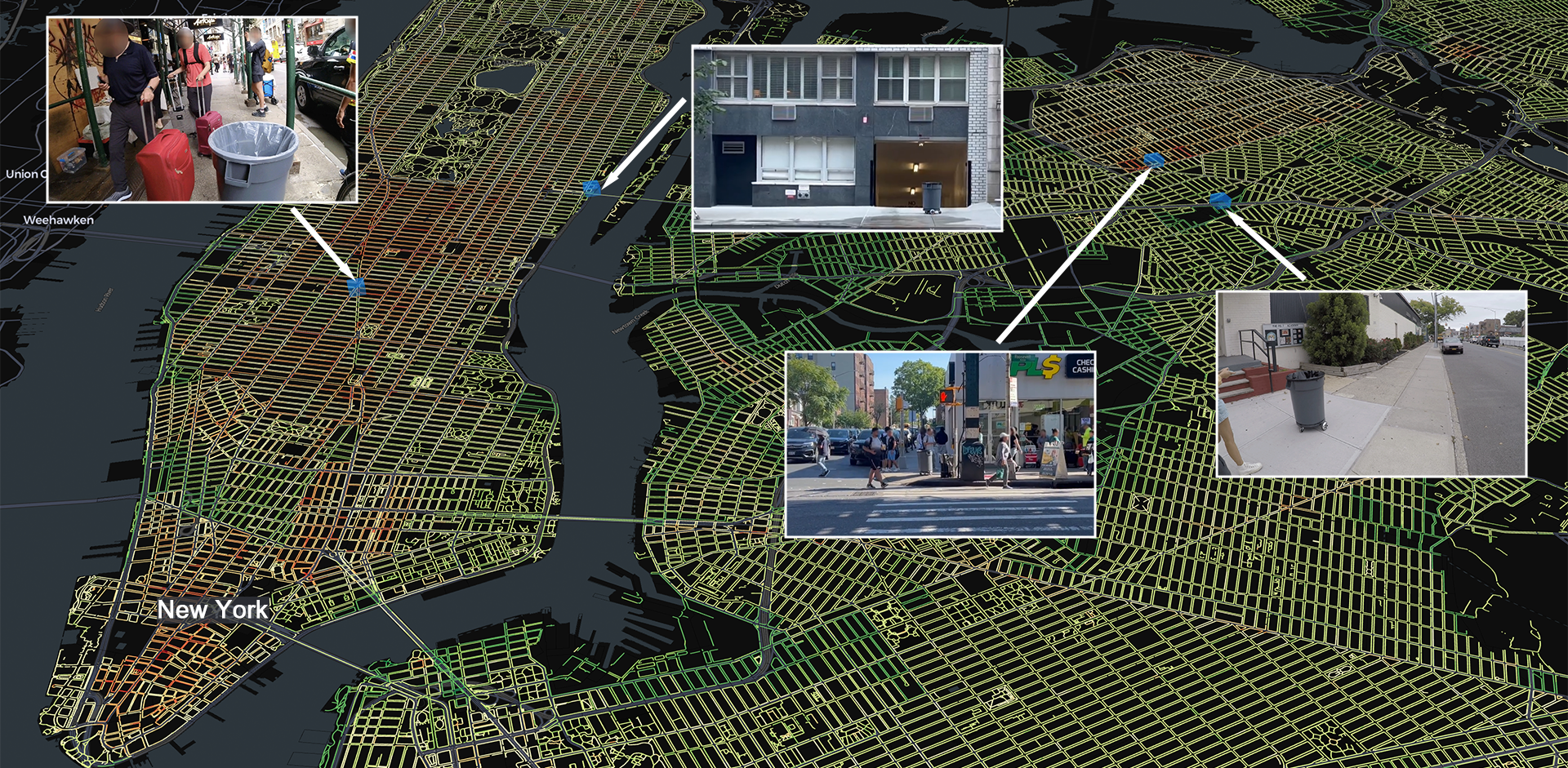
The Robotability Score
The Robotability Score (R) is a novel metric that quantifies how suitable urban environments are for autonomous robot navigation. Through expert interviews and surveys, we've developed a standardized framework for evaluating urban landscapes to reduce uncertainty in robot deployment while respecting established mobility patterns. Streets with high Robotability are both more navigable for robots and less disruptive to pedestrians. We've constructed a proof-of-concept Robotability Score for New York City using a wealth of open datasets from NYC OpenData, and inferred pedestrian distributions from a dataset of 8 million dashcam images taken around the city in late 2023.
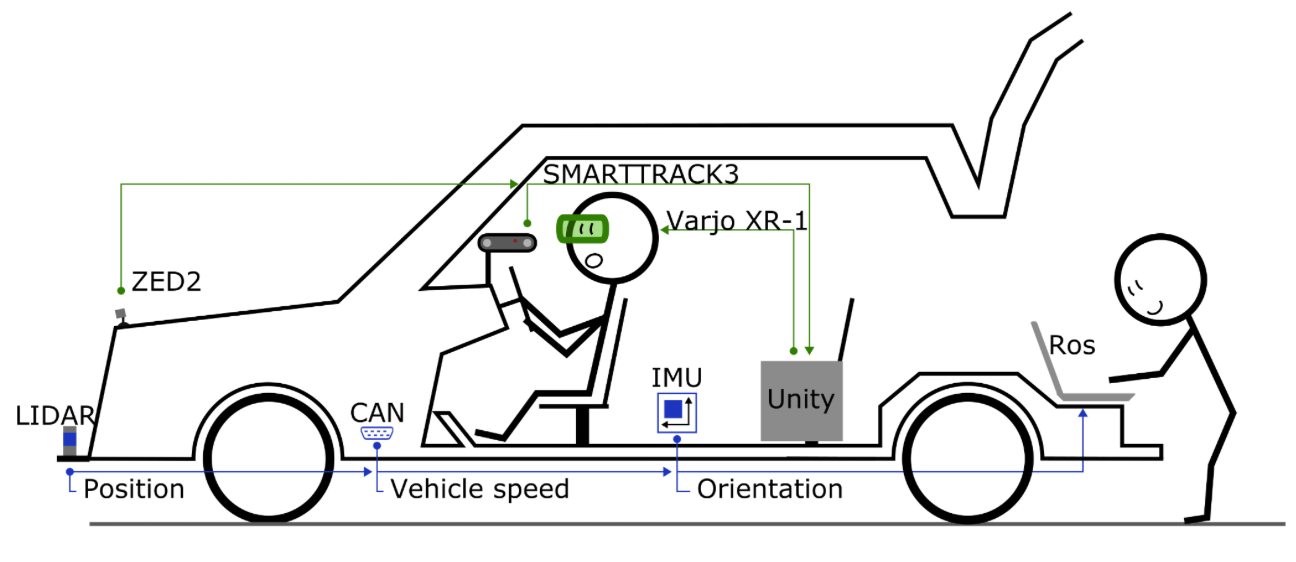
XR-OOM: MiXed Reality Driving Simulation With Real Cars
High-fidelity driving simulators can act as testbeds for designing in-vehicle interfaces or validating the safety of novel driver assistance features. In this system paper, we develop and validate the safety of a mixed reality driving simulator system that enables us to superimpose virtual objects and events into the view of participants engaging in real-world driving in unmodified vehicles. To this end, we have validated the mixed reality system for basic driver cockpit and low-speed driving tasks, comparing the use of the system with non-headset and with the headset driving conditions, to ensure that participants behave and perform similarly using this system as they would otherwise. Read our paper here: https://doi.org/10.1145/3491102.3517704